Concave hull is a very common problem.
I use the VB script from here:
https://www.grasshopper3d.com/forum/topics/connecting-points-in-sequence
It would be nice to have it in GH2.
Concave hull is a very common problem.
I use the VB script from here:
https://www.grasshopper3d.com/forum/topics/connecting-points-in-sequence
It would be nice to have it in GH2.
it is a very good idea, there are many methods
http://www.portailsig.org/content/sur-la-creation-des-enveloppes-concaves-concave-hull-et-les-divers-moyens-d-y-parvenir-forme
Alpha Shape
K-nearest
https://www.researchgate.net/publication/220868874_Concave_hull_A_k-nearest_neighbours_approach_for_the_computation_of_the_region_occupied_by_a_set_of_points
Alpha Concave Hull
https://www.google.fr/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&cad=rja&uact=8&ved=0ahUKEwiZxPOTyIfcAhXIShQKHRLpDrAQFgg4MAE&url=https%3A%2F%2Farxiv.org%2Fpdf%2F1309.7829&usg=AOvVaw3niXMWUfjpss7elOCUMHzc
Delaunay method
Suppress too big triangles
Here a script that shows differents implementations of Concave Hull
David’s method delivers different results for very similar cases.
As for those profiles in the image: the middle one will always come out wrong even thought I slide the F input between different values. Sometimes I get a self-intersecting curve.
Thanks for putting these algorithms together laurent - extremely helpful reference.
Fantastic!
Concave Hull, any updates ?
It would be great to have a rhino.geometry.polylinecurve.createconcavehull2d method in addition to the already existing createconvexhull2d. Thank you devs for all your hard work.
https://developer.rhino3d.com/api/rhinocommon/rhino.geometry.polylinecurve/createconvexhull2d
concave_hull.gh (17.4 KB)Concave Hull (α-shape) component for Grasshopper (Python 3)
I’ve just wrapped up a Python 3 script for Grasshopper that builds concave hulls using Edelsbrunner’s α-shape criterion using openai. In case anyone wants the intuition before diving into the code:
Conceptually this is straight from Edelsbrunner et al.’s α-shape work (nice visual here: https://www.researchgate.net/figure/The-alpha-shape-criteria_fig2_341645060) and mirrors the approach described in CGAL’s docs (CGAL 6.0.1 - 2D Alpha Shapes: User Manual). Similar performance to the alphashape component from Milkbox.
Hello all!
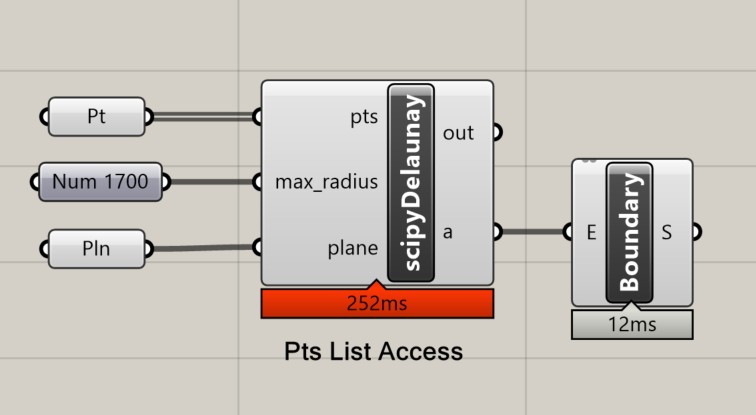
I wrote with ChatGPT a Python script using scipy Delaunay with a max_radius for accuracy.
scipyDelaunay 250703BC.gh (94.6 KB)
import Rhino
import scriptcontext as sc
import rhinoscriptsyntax as rs
import numpy as np
from scipy.spatial import Delaunay
# Inputs:
# pts: list of points (Point3d or Guids)
# max_radius: float
# plane: Rhino.Geometry.Plane
def alpha_shape(points, max_radius, plane):
if len(points) < 4:
return []
# Project to plane & get UV
uv_coords = []
for pt in points:
pt_on_plane = plane.ClosestPoint(pt)
success, u, v = plane.ClosestParameter(pt_on_plane)
if success:
uv_coords.append([u, v])
coords = np.array(uv_coords)
tri = Delaunay(coords)
edge_count = {}
for ia, ib, ic in tri.simplices:
pa = coords[ia]
pb = coords[ib]
pc = coords[ic]
a = np.linalg.norm(pb - pc)
b = np.linalg.norm(pa - pc)
c = np.linalg.norm(pa - pb)
s = (a + b + c) / 2.0
area = max(s * (s - a) * (s - b) * (s - c), 1e-10)
area = np.sqrt(area)
circum_r = (a * b * c) / (4.0 * area)
if circum_r < max_radius:
edges = [(ia, ib), (ib, ic), (ic, ia)]
for edge in edges:
e = tuple(sorted(edge))
if e in edge_count:
edge_count[e] += 1
else:
edge_count[e] = 1
# Keep edges used only once
boundary_edges = [e for e, count in edge_count.items() if count == 1]
# Build adjacency dictionary
adj = {}
for e in boundary_edges:
adj.setdefault(e[0], []).append(e[1])
adj.setdefault(e[1], []).append(e[0])
# Find all loops
visited = set()
polylines = []
for start in adj.keys():
if start in visited:
continue
loop = [start]
visited.add(start)
current = start
prev = None
while True:
neighbors = adj[current]
next_pt = None
for n in neighbors:
if n != prev and n not in visited:
next_pt = n
break
if next_pt is None:
if len(loop) > 2 and loop[0] in adj[current]:
loop.append(loop[0]) # Close loop
break
loop.append(next_pt)
visited.add(next_pt)
prev, current = current, next_pt
if len(loop) >= 4:
# Convert to 3D points
poly_pts = []
for idx in loop:
uv = coords[idx]
pt3d = plane.PointAt(uv[0], uv[1])
poly_pts.append(pt3d)
polyline = Rhino.Geometry.Polyline(poly_pts)
if polyline.IsValid and polyline.IsClosed:
polylines.append(polyline.ToNurbsCurve())
return polylines
# --- Coerce points ---
pts_fixed = []
for p in pts:
if isinstance(p, Rhino.Geometry.Point3d):
pts_fixed.append(p)
else:
pt = rs.coerce3dpoint(p)
if pt:
pts_fixed.append(pt)
# --- Run function ---
curves = alpha_shape(pts_fixed, max_radius, plane)
a = curves
I need some help:
The script works great for a single list of points and a single plane, but I cannot make it work when I have several lists of points and several planes.
Can anyone improve it?
Thanks!