Hello guys,
Is there any way to find the outer surface of a point cloud in Grasshopper? I´ve been working with robotic manipulators and would like to find a nice way of representing workspaces as a closed surfaces, so that one could make sections and analyse them as wished.
Until now, I have been creating spheres centered in those points (via Grasshopper) and working with multiple intersection planes to draw (manually) a rough outer surface from curves in different levels. 
I would be happy to find a smarter way of accomplishing this task.
Thanks a lot!
OuterSurface_PointCloud.gh (3.8 KB)
Alpha shape 3d ?
And no data in your file !!!
Sorry. Laurent. I thought I had successfully internalised the .txt data to the .gh file. In any case, I send it attached.
Thanks for the tip about the Alpha shape! I am trying to learn it.
Workspace.txt (200.9 KB)
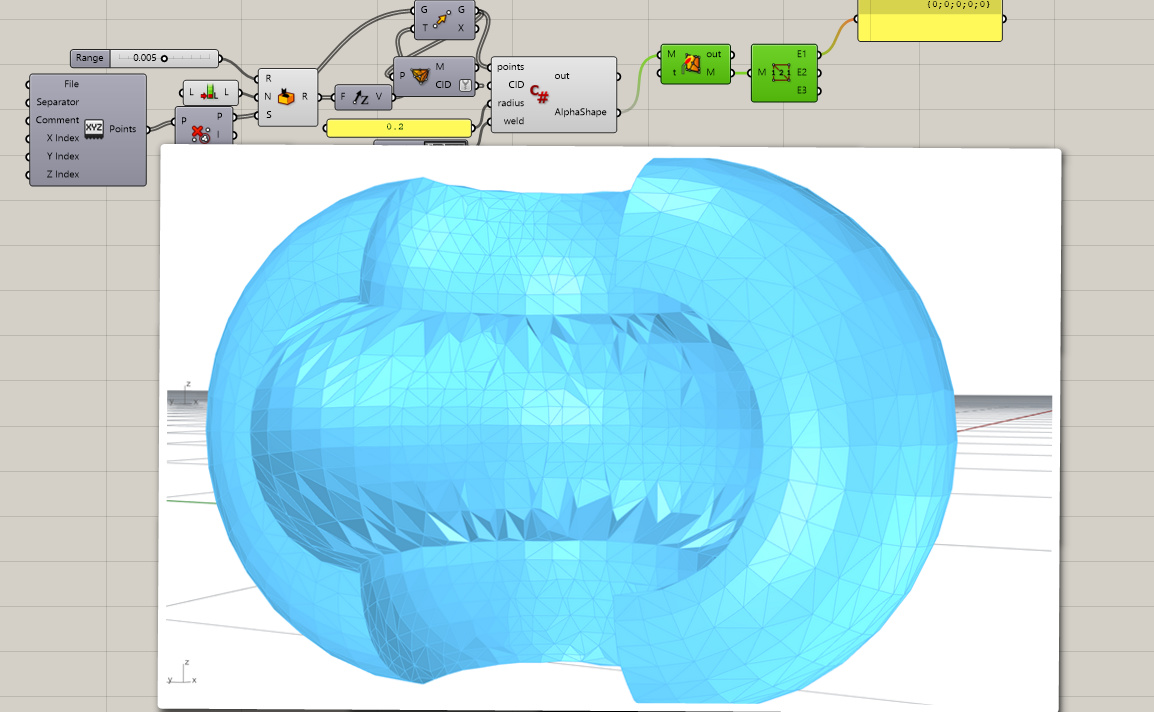
Here the script with Alpha Shape 3d
There are some holes but you have a mesh. Parallel version of Alpha Shape is faster.
point cloud alpha shape.gh (13.5 KB)
There are windows !! I dn’t know if it is my script or Delaunay 3d (from Mesh Edit)
And with some random move on Z the mesh is closed
point cloud alpha shape.gh (12.7 KB)
3 Likes
Laurent,
That´s amazing! I really appreciate what you did here. Thanks! This helps me a lot!
Regards,
Good stuff. BTW: I would suggest some auto calculate ability for the radius. Shown an internal BPA thingy for LIDAR pts and the likes.
1 Like