Hi Daniel,
I am trying to pose meshes using solutions discussed in this post:
I thought it would be nice to represent the initial skeleton line network as a series of RigidBody elements and use other constraints to create what is usually referred to as an animation rig.
I’ve noticed you recently experimented with similar ideas here
When I try to use the results of the RigidBody simulation in either Fattener or CageMorph a lot of twists are introduced and the geometry heavily distorts.
Is there a better way to do this or a trick to stop the twists being introduced?
Here is my attempt so far.
20200714 Skeleton Fatten & RigidBody pose FORUM.gh (29.8 KB)
Thanks!
1 Like
I’m not the Daniel you want but that looks super funny so I tried it. Deleted the data recorder & set the cage morph weigthings to true as boolean toogle. Is that what you are after? It has still some minor distoritions but not as much as in your video.
Edit: Okay, I tried to better understand that. My video actually show only fattener & wb catmullclark, the cage morph does exactly nothing.
2 Likes
I think it could also work well to use beams and 6dof for this like so:
wobblywhale.gh (30.1 KB) BlueWhale.3dm (2.1 MB)
(model is from here https://www.turbosquid.com/FullPreview/Index.cfm/ID/781785)
13 Likes
This hilarious  I vote for you to add it to the kangaroo examples
I vote for you to add it to the kangaroo examples 
1 Like
Wow, thanks! Super interesting approach. Very simple and responsive and a great way to understand beam forces. I like how you passed the planar consistency through K2 and onto MeshCageMorph.
Is MCM really sensitive the the way the reference and target mesh are constructed? I am wondering whether this can be extended to fins and limbs!?
Thanks again!
1 Like
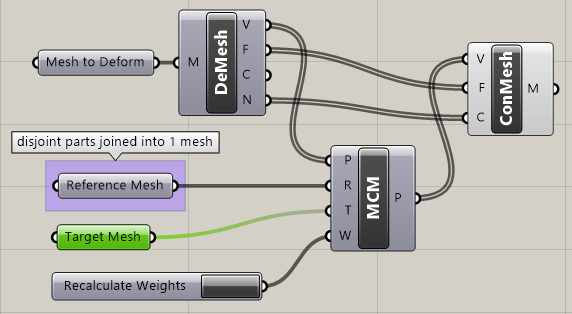
Yes, for the mesh cage morph to work, the reference and target meshes have to have identical topology (i.e. the same number of vertices and faces, in the same order, and faces referencing the same vertices. The only thing that should change is the positions of the vertices.)
The mesh can actually consist of multiple disjoint (closed) parts though (this actually came as a surprise to me, since I didn’t consider this possibility when writing it!). They also don’t need to completely enclose the object, and the deformations blend smoothly outside the cage.
The beam approach in my last post is extendable to limbs. The definition gets a bit more complex though depending on how you want the joints to behave. Each beam segment should have its start and end frames parallel, with their Z axes coincident. I’ll try and put together an example.
The bit I was still trying to improve is the plastic joints, so you can do something like bend an elbow and have it hold an angle, and not have the downstream parts of the skeleton like the hand lose their pose during this. I’m trying to do this without having to have a hard IK or FK mode, but more an adjustable mixing of the two. In this sense, something that moves like a fish is actually easier, since moving it all with soft IK looks right.
I’ll also try and get something ready to share with new skinning with just frames as bones, like in the dinosaur example. This way you don’t need to create any cages, just planes.
11 Likes
Thanks!! Lots to think about.
