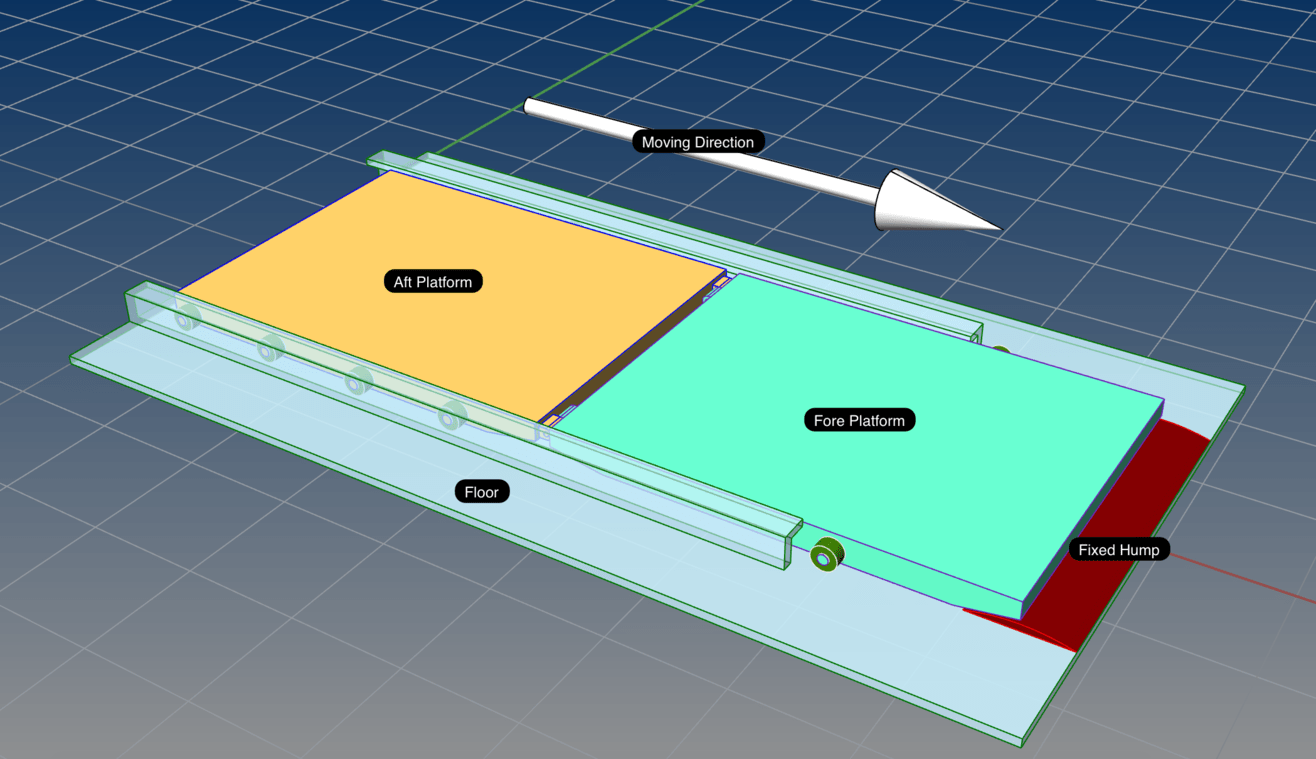
I have a project to design a hydraulic operated platform with two parts connected each other with hinges. There should be a fixed hump in front of FWD Platform part which automatically raises the fore part of FWD Platform by moving the AFT Platform in X Direction…
So, I have preliminary completed 3D Model of the parts. now i have to decide the dimensions of the platforms, the hump size and the angled bottom parts of the platform in order to match my project…
I don’t fully understand what you want to accomplish. Do you want a simulation of the mechanism, or need help with the modeling?
If it is the former, there are a few options:
Use Bongo 2, there is a IK concept (Inverse kinematics) that can help you create an animation.
If you go for Grasshopper there are three options:
Use Kangaroo, with solid body collision, but I never managed to make it work properly with gravity and collision.
Use FlexHopper, It is a physics engine based on FlexCLI, I never had time to play with it, it seemed it has a pretty steep learning curve.
try to invent the motions with simple grasshopper components. This should not be that difficult to just rotate one of your parts. But it will not be a kinematic simulation for sure, you’ll need to do it all. If you set one of your sliders to drive the “simulation” you can animate it with right-click on the slider and “animate”