Not sure if this is relevant, but I played around a bit with a Kangaroo method that might be of use.
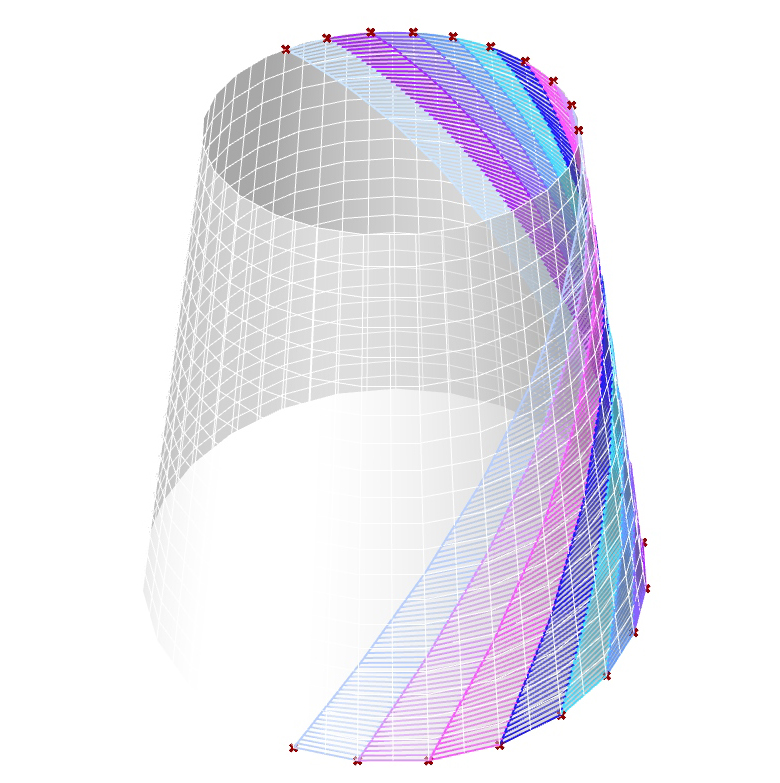
I haven’t tested whether the strips here are of a constant width, but their edge curves should be geodesic to the cone?
WrapRibbons_NB_v1.gh (29.8 KB)
More on this method here: