
I am very excited to announce the release of Assembler!
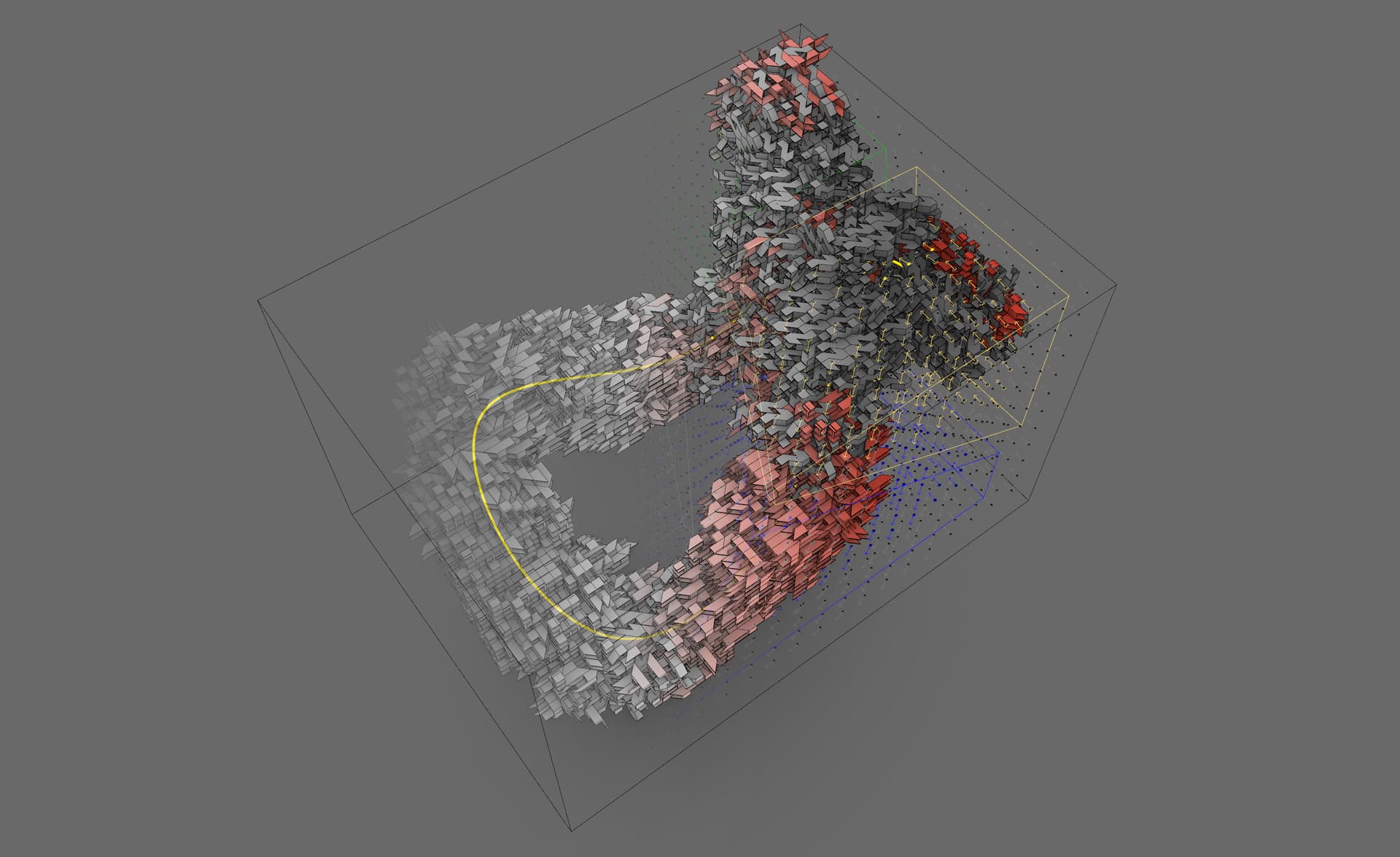
Assembler is a Grasshopper plugin that helps you construct and manage assemblages of parts, conceived with (but not limited to) the architectural scale in mind.
You can find all relevant links and detailed info (including documentation, example files, and GitHub page) here:
https://www.co-de-it.com/assembler.html
With Assembler, you can create assemblages from parts and rules for their connection, manage the criteria for the assemblage growth and its interaction with environmental geometries and data, and perform local (part) and global (assemblage) level computation on the results for analysis or post-processing.
Assembler is the result of 2 years of research and teaching. Developing it was, and still is, a learning journey: it taught me so much already about ways of thinking and making, and, at every turn, there’s always something new and unexpected (and not always pleasant, but still part of the process), new possibilities open up and demand to be explored (I file them in a “wild ideas” note).
There is a philosophy behind the tool, (synthetically) described in a section of the documentation. By all means, feel free to skip it; I believe a tool shouldn’t be restricted to the sole purpose it was intended for, but its affordances must be explored also through peruse, misuse and abuse (without harming anyone of course).
Now, it’s your turn. I look forward to seeing what you can do with it, and what I can learn from you.
Happy exploring!
Alessio
Links:
. Assembler on food4Rhino
. Documentation
. Example Files
. GitHub page
PS: If you are showcasing something made with Assembler, I’d love it if you tag me and/or Co-de-iT and use the #madewithassembler hashtag!