not in all cases, though i also noticed and can confirm that, when you match an already continuous surface that it breaks up. you can set matching to tangency at this point and it will stay G2. but i have the feeling that it changes the rest of the surface. so try carefully if this helps.
i theorize that matching has some sort of progressive algorithm, which moves some cvs further in that case past the aim. or it has to do with the amount of points being available. i had the feeling i ran into some similar issue with matching curves which have too little points, here the thread where this was slightly discussed. it probably does not contain much concerning this matter but could provide a clue. idk
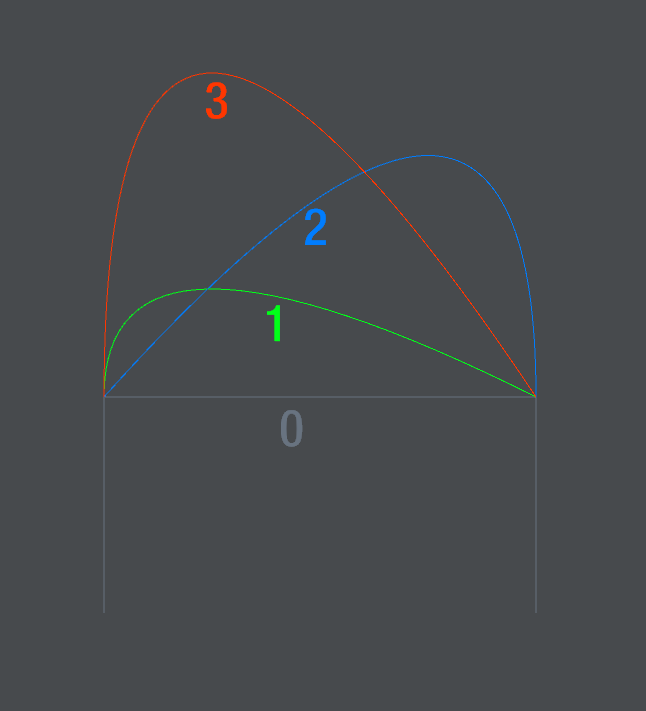
here in the image below this phenomenon for curves pointed out once more. the numbers represent the amount of matches. in a degree 2 curve with 3 points one can match repeatedly and it will keep growing forever having it set to continuity and position. maybe this has to do with it.