I´m looking into funicular floor slabs for my master thesis, but first need to clearly understand the aspect of form finding.
Here I am currently experimenting with Kangaroo and RhinoVault 2 and would like to practically understand the differences between these two approaches (virtual force-based physics engine vs. thrust network analysis).
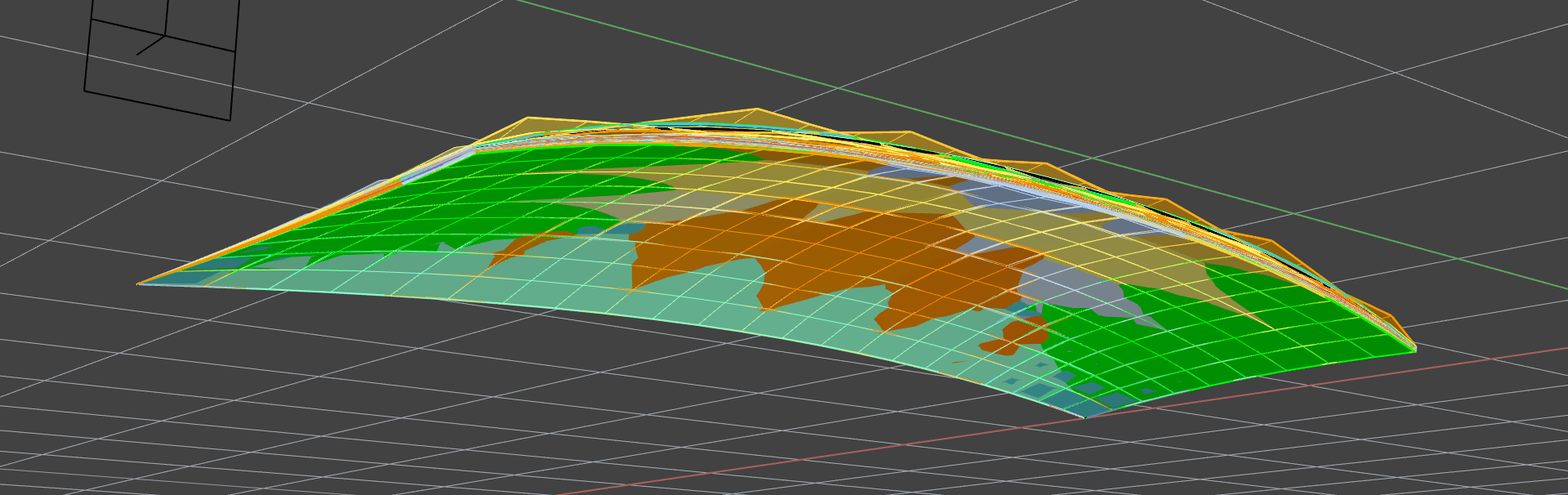
Therefore I created a simple rectangular base mesh with RV2 (with a ~10% sag to the middle in order to avoid invite stresses in the boundary in the resulting funicular shape).
Then I created the “vertical equilibrium” in RV2 and tried to achieve the same shape with Kangaroo (=high stiffness for the edges, a bit longer than the rest length and a small vertical force.) Below you see the RV2 result in purple and the Kangaroo result in green:

Interestingly these two ways of form finding do not result in the same shape, the Kangaroo mesh having less curvature. These are two different approaches to create funicular shapes, so some minor deviations are to be expected.
However I am wondering if I maybe missed sth in the Kangaroo simulation that should be included? AFAIK, the funicular form with a given loading and boundary conditions is exactly calculable? So one of these result must be less optimal?
Any insights would be much appreciated!
Cheers Rudi
rv2_kang.gh (20.8 KB)
rv2_kang.3dm (85.7 KB)