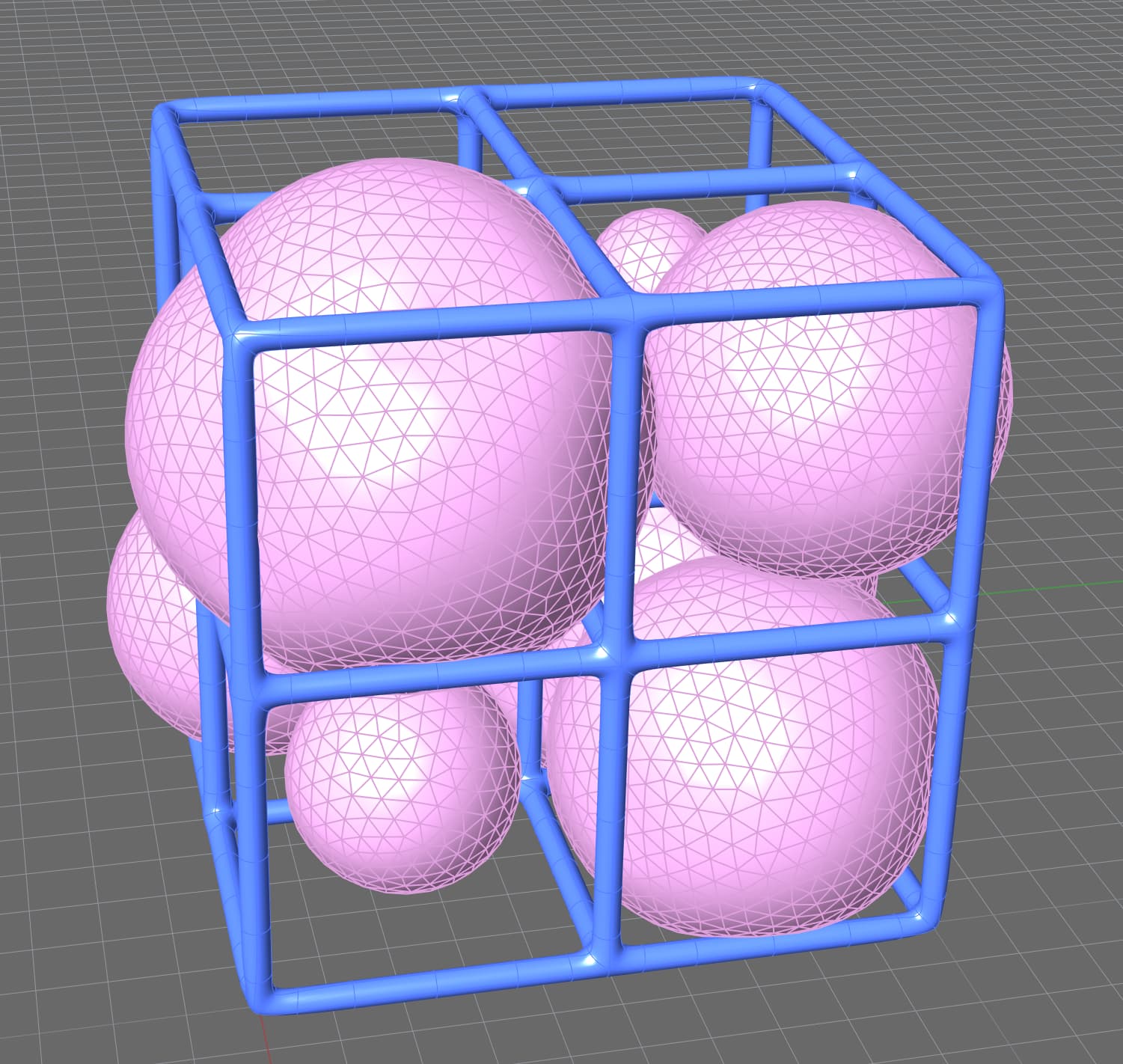
I`d like to create a inflatable structure with Kangaroo, which is “trapped” inside a cage and is pushing through the open spaces.
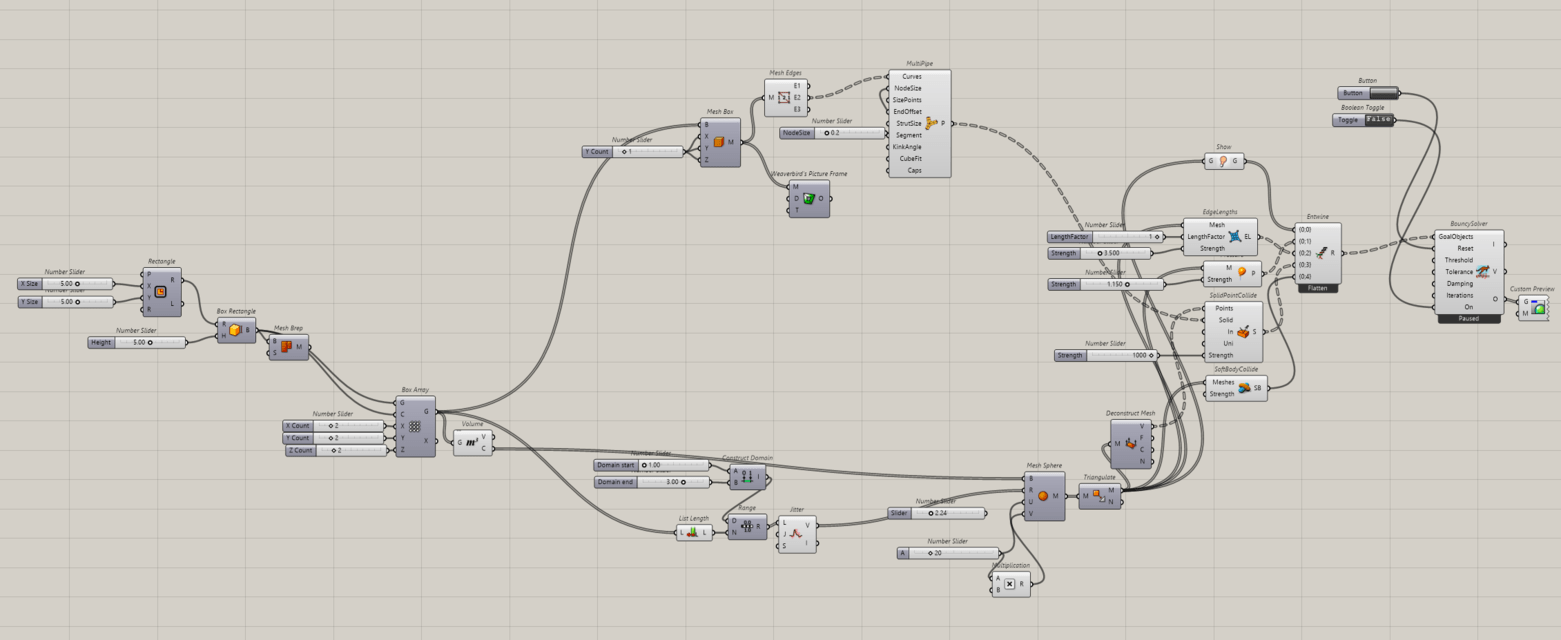
As a collision object (the cage) I used a box and Multipipe to get a volume out of the wireframe. Inside the cage are 8 different mesh spheres, which should inflate and also collide with each other.
The collision between the spheres is working good but the spheres are pushing through the cage at a certain point.
And I dont know what Im doing wrong.
If I increase the target volume before starting the simulation, the same problem reappears at some point. If I change them during the simulation, it works much better.
So start the simulation with a low target value and than increase it slowly.
Is there a parameter I could change to avoid this?
You have the right approach increasing the target volume slowly.
If there is a big instantaneous difference at the start between the initial volume and target volume, it can cause parts to move so fast in one iteration that it misses a collision.
Another alternative might be to combine this with the the edge collision goal I shared here
It would probably be slower than just checking the vertices for collision with the frame, but less prone to passing through it.