McNeel Forum
Control points' math relation of G2 continuity
Grasshopper
rhino6
Joseph_Oster
May 24, 2020, 7:36pm
15
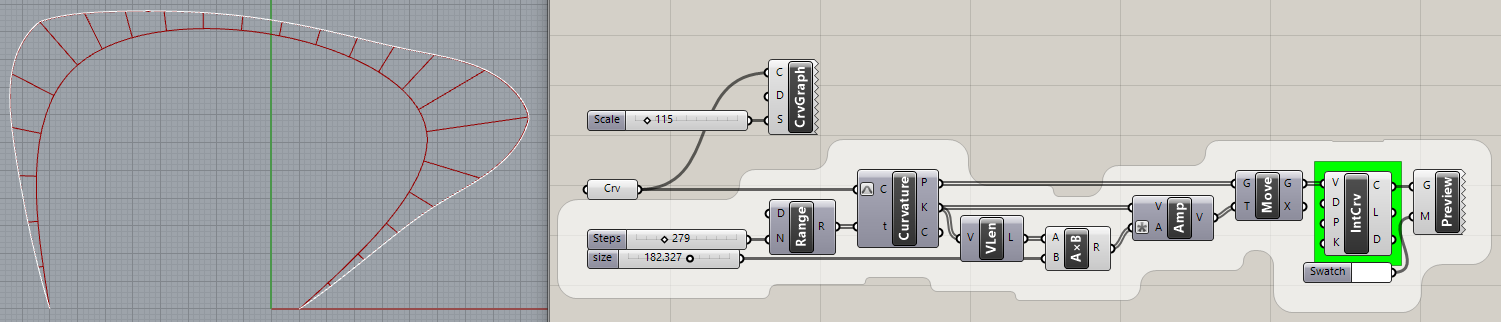
You can generate your own like this
(white group)
:
Curvature_2020May24a
1501×322 56.2 KB
Curvature_2020May24a.gh
(10.9 KB)
1 Like
Curvature graph density
show post in topic
Related topics
Topic
Replies
Views
Activity
Dependency Curve curvature to control point position
Grasshopper Developer
1
435
December 10, 2020
MatchCrv on a surface
Rhino
mac
3
171
December 10, 2023
Remake curves with control points
Grasshopper
2
410
January 20, 2020
MatchCrv in gh
Grasshopper
8
2457
December 24, 2023
Points on curve problem
Grasshopper
4
652
December 6, 2018