my first thought was that this would be sort of Kangarooable, at least up to a certain degree
then I had this weird vision of solving it using a Voronoi diagram centered on the tree positions -because Voronoi is always the key- but I got taken away by the thing I could actually draw trees as lines pointing from the center of each circle to division points of the circle itself, which looks very cool, and didn’t continue on that path (but very very cool indeed…)
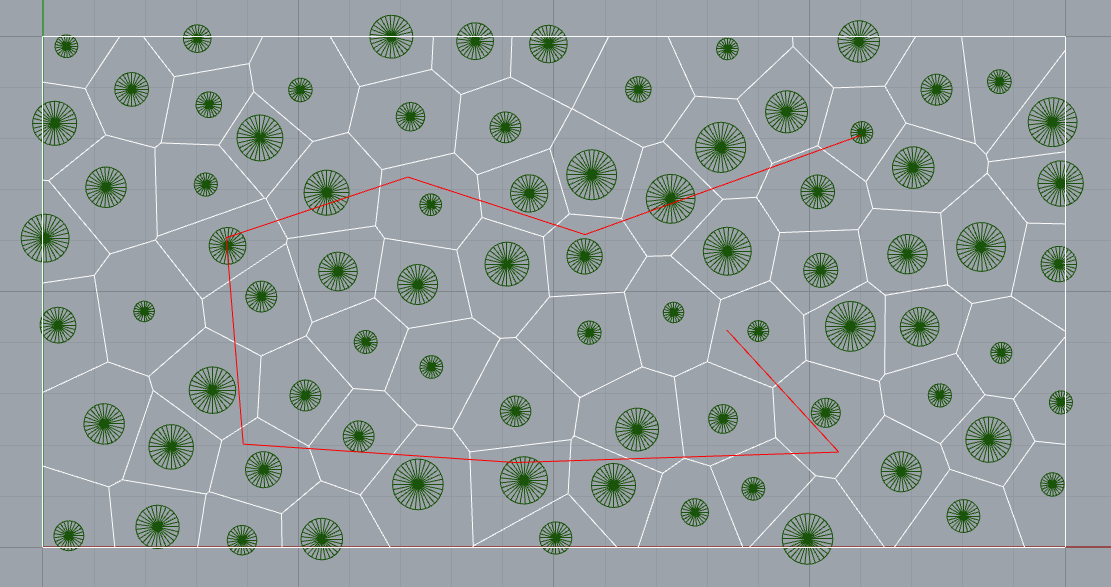
speaking of the matter, it looks to me like a decision tree where each step you can choose direction and length of the next arc based on something like this:
regardless of how you ended up into a given point, the info you have is:
→ the point where you are now (START)
→ the tangent vector of the previous arc, that identifies the position of the centers of your next arcs (in blue)
→ the min/max amount you can walk along arcs A, B, A’, B’

so even if at the end you have to build arcs to move around the final path, maybe an idea would be to pre-calculate the available vectors that move you from start to given points on A, A’, B, B’ and start combining just those in such a way you “keep following” more or less the polyline built over the initial points that define your final path
using GH plugins (like Anemone) and no coding, I don’t know how much deep you might be willing to go with decision making… I’m not a big head but this looks like a case study for recursion with some sort of backtracking in case there are some dead-ends that make you hit a tree regardless of next A, A’, B, B’ ? or maybe it’s just too much gin tonic? is this kangarooable for real? maybe the problem is much easier and this is just an overkill ![]() who knows
who knows
if you want to give us some numbers, or maybe even better a GH file where the trees are and the points that define the path (and the arcs radii and min/max lengths…) are already there
or maybe those numbers are just generated randomly for the sake of the problem itself? again, who knows ![]()