Thank you Joe, pretty good actually, for a quick attempt. eyeballing the results, looks like it is within less than 1% of theoretical maximum. Pretty good. Thank you.
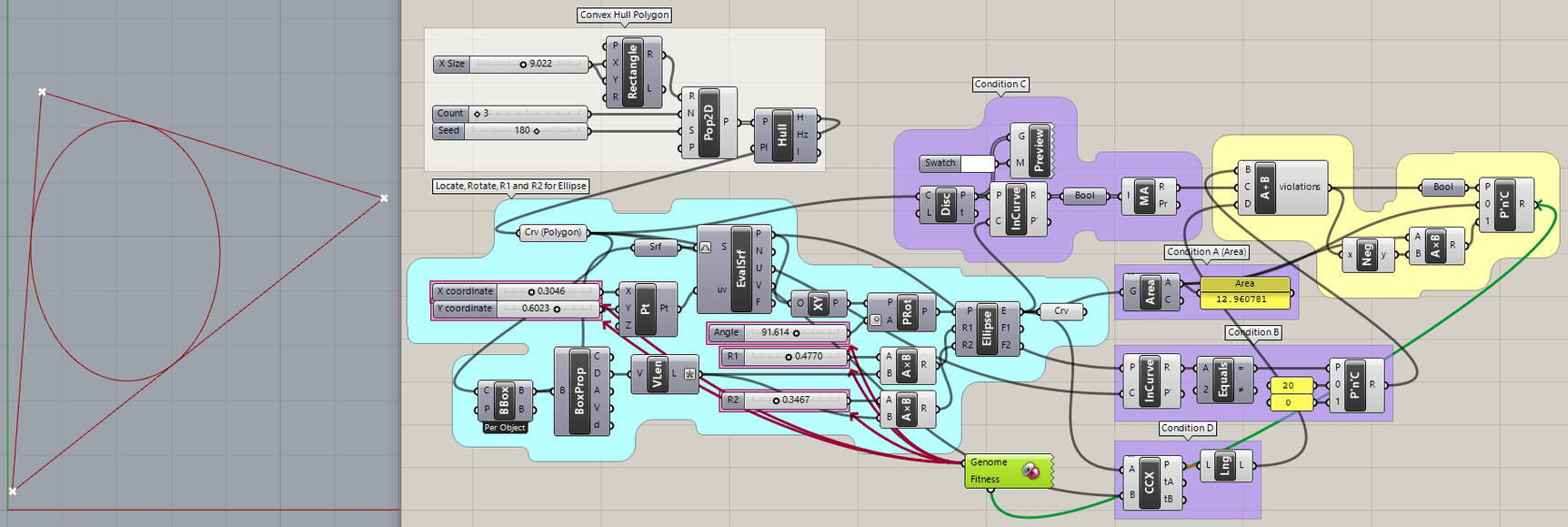
Of course, typical design, 1,200+ polygons to run through, then I will decide that I don’t like it, so I will tweak it then run it again, and so on.
I can use your approach, but would prefer to find an algorithmic approach for easier inclusion into design flow. here is the matlib code, if anyone is fluent in its’ syntax:
% Section 8.4.1, Boyd & Vandenberghe “Convex Optimization”
% Original version by Lieven Vandenberghe
% Updated for CVX by Almir Mutapcic - Jan 2006
% (a figure is generated)
%
% We find the ellipsoid E of maximum volume that lies inside of
% a polyhedra C described by a set of linear inequalities.
%
% C = { x | a_i^T x <= b_i, i = 1,…,m } (polyhedra)
% E = { Bu + d | || u || <= 1 } (ellipsoid)
%
% This problem can be formulated as a log det maximization
% which can then be computed using the det_rootn function, ie,
% maximize log det B
% subject to || B a_i || + a_i^T d <= b, for i = 1,…,m
% problem data
n = 2;
px = [0 .5 2 3 1];
py = [0 1 1.5 .5 -.5];
m = size(px,2);
pxint = sum(px)/m; pyint = sum(py)/m;
px = [px px(1)];
py = [py py(1)];
% generate A,b
A = zeros(m,n); b = zeros(m,1);
for i=1:m
A(i, = null([px(i+1)-px(i) py(i+1)-py(i)])’;
= null([px(i+1)-px(i) py(i+1)-py(i)])’;
b(i) = A(i,.5[px(i+1)+px(i); py(i+1)+py(i)];
if A(i,:)*[pxint; pyint]-b(i)>0
A(i, = -A(i,:);
b(i) = -b(i);
end
end
% formulate and solve the problem
cvx_begin
variable B(n,n) symmetric
variable d(n)
maximize( det_rootn( B ) )
subject to
for i = 1:m
norm( B*A(i,:)’, 2 ) + A(i,:)*d <= b(i);
end
cvx_end
% make the plots
noangles = 200;
angles = linspace( 0, 2 * pi, noangles );
ellipse_inner = B * [ cos(angles) ; sin(angles) ] + d * ones( 1, noangles );
ellipse_outer = 2*B * [ cos(angles) ; sin(angles) ] + d * ones( 1, noangles );
clf
plot(px,py)
hold on
plot( ellipse_inner(1,:), ellipse_inner(2,:), ‘r–’ );
plot( ellipse_outer(1,:), ellipse_outer(2,:), ‘r–’ );
axis square
axis off
hold off