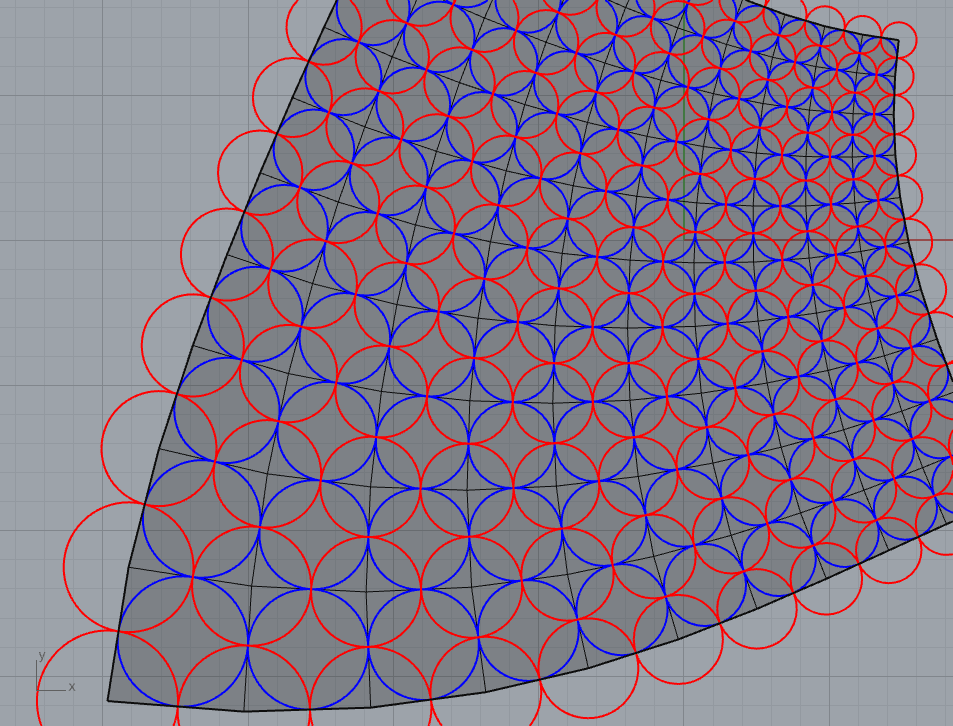
For these S-Isothermic meshes (each quad has an incircle, and the points of tangency of these incircles match between adjacent quads), in the plane, you can always draw a circle through the points of tangency around a vertex to form another circle packing (shown in red below).
You can also apply Möbius transformations to these meshes in the plane, so that they instead lie tangent to a sphere, and the red circles stay tangent.

However, I believe that these are the only cases where the points of tangency also lie on circles like this - for S-Isothermic meshes in general, each quad still has an incircle, but the points of tangency only lie on a common sphere, not on the same plane.

Stefan’s thesis is a good place to read more about this:
S-Isothermic meshes have some nice properties, but if it is offset meshes you are after, conical meshes are probably more useful.