Hello
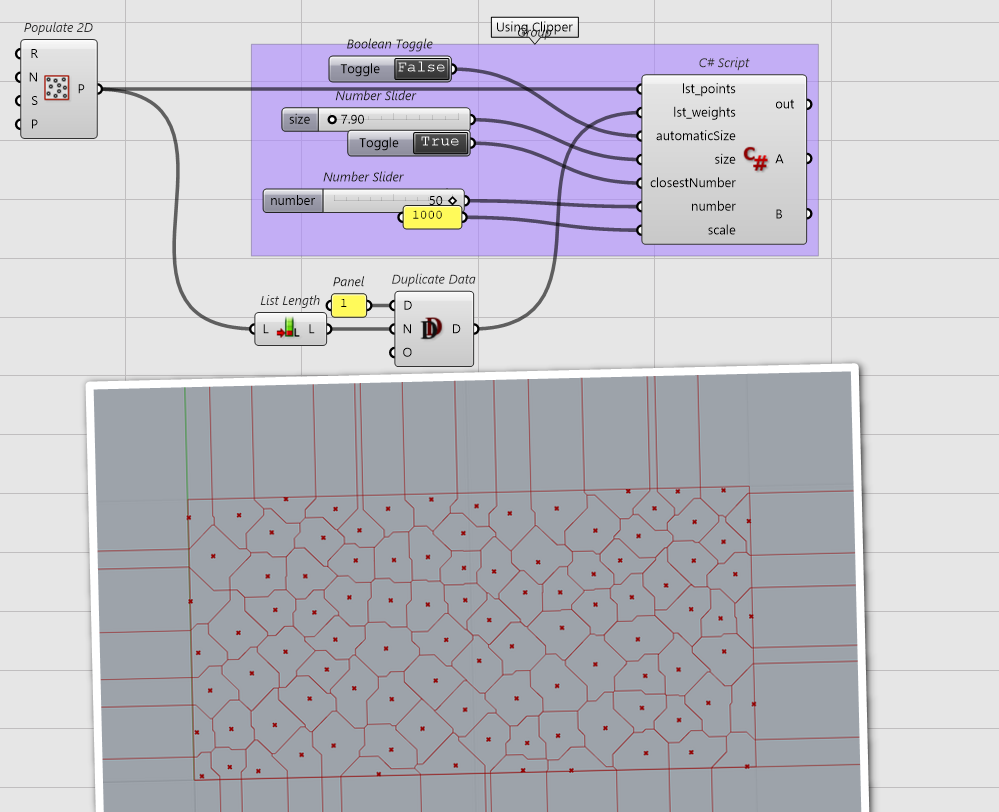
I use code and Clipper. I never ended nicely the tool. If you want to redo the algorithm. This one work.
voronoi_ManhattanClipper.gh (12.4 KB)
To have the good dll
Right click on component “Manage Assemblies”

Go to Component Folder


Use the dll named ClipperTools.dll
using System;
using System.Collections;
using System.Collections.Generic;
using Rhino;
using Rhino.Geometry;
using Grasshopper;
using Grasshopper.Kernel;
using Grasshopper.Kernel.Data;
using Grasshopper.Kernel.Types;
using System.Linq;
using System.Windows.Forms;
using ClipperLib;
/// <summary>
/// This class will be instantiated on demand by the Script component.
/// </summary>
public class Script_Instance : GH_ScriptInstance
{
#region Utility functions
/// <summary>Print a String to the [Out] Parameter of the Script component.</summary>
/// <param name="text">String to print.</param>
private void Print(string text) { /* Implementation hidden. */ }
/// <summary>Print a formatted String to the [Out] Parameter of the Script component.</summary>
/// <param name="format">String format.</param>
/// <param name="args">Formatting parameters.</param>
private void Print(string format, params object[] args) { /* Implementation hidden. */ }
/// <summary>Print useful information about an object instance to the [Out] Parameter of the Script component. </summary>
/// <param name="obj">Object instance to parse.</param>
private void Reflect(object obj) { /* Implementation hidden. */ }
/// <summary>Print the signatures of all the overloads of a specific method to the [Out] Parameter of the Script component. </summary>
/// <param name="obj">Object instance to parse.</param>
private void Reflect(object obj, string method_name) { /* Implementation hidden. */ }
#endregion
#region Members
/// <summary>Gets the current Rhino document.</summary>
private readonly RhinoDoc RhinoDocument;
/// <summary>Gets the Grasshopper document that owns this script.</summary>
private readonly GH_Document GrasshopperDocument;
/// <summary>Gets the Grasshopper script component that owns this script.</summary>
private readonly IGH_Component Component;
/// <summary>
/// Gets the current iteration count. The first call to RunScript() is associated with Iteration==0.
/// Any subsequent call within the same solution will increment the Iteration count.
/// </summary>
private readonly int Iteration;
#endregion
/// <summary>
/// This procedure contains the user code. Input parameters are provided as regular arguments,
/// Output parameters as ref arguments. You don't have to assign output parameters,
/// they will have a default value.
/// </summary>
private void RunScript(List<Point3d> lst_points, List<double> lst_weights, bool automaticSize, double size, bool closestNumber, int number, double scale, ref object A, ref object B)
{
A = Manhattan(lst_points, lst_weights, automaticSize, size, closestNumber, number, scale);
//B = BooleanIntersection(lst_polylines, scale);
}
// <Custom additional code>
public static List<IntPoint> GeoPoints3dToIntPoints(Polyline poyline, double scale)
{
List<IntPoint> lst_IntPoints = new List<IntPoint>();
foreach (Point3d point in poyline)
{
IntPoint ptInt = new IntPoint(point.X * scale, point.Y * scale);
lst_IntPoints.Add(ptInt);
}
return lst_IntPoints;
}
public static List<IntPoint> BooleanIntersection(List<IntPoint> pl_1, List<IntPoint> pl_2)
{
Clipper cp = new Clipper();
cp.AddPath(pl_1, PolyType.ptSubject, true);
cp.AddPath(pl_2, PolyType.ptClip, true);
List<List<IntPoint>> lst_polygons = new List<List<IntPoint>>();
List<IntPoint> output = pl_1;
if (cp.Execute(ClipType.ctIntersection, lst_polygons, PolyFillType.pftNonZero, PolyFillType.pftNonZero))
{
if (lst_polygons.Count > 0)
{
output = lst_polygons[0];
}
}
return output;
}
public static Polyline BooleanIntersection(Polyline pl_1, Polyline pl_2, double arg_scale)
{
Clipper cp = new Clipper();
cp.AddPath(GeoPoints3dToIntPoints(pl_1, arg_scale), PolyType.ptSubject, true);
cp.AddPath(GeoPoints3dToIntPoints(pl_2, arg_scale), PolyType.ptClip, true);
List<List<IntPoint>> lst_polygons = new List<List<IntPoint>>();
cp.Execute(ClipType.ctIntersection, lst_polygons, PolyFillType.pftNonZero, PolyFillType.pftNonZero);
List<Polyline> lst_polylines_out = new List<Polyline>();
foreach (List<IntPoint> lst_intPoints in lst_polygons)
{
//On ajoute chaque liste de points du polygone fermé dans une liste (
lst_polylines_out.Add(new Polyline(ClipperClosedPolygonToRealGeopPoint3d(lst_intPoints, arg_scale)));
}
return lst_polylines_out[0];
}
public static Polyline BooleanIntersection(List<Polyline> lst_polylines, double arg_scale)
{
List<IntPoint> lst_pl = GetClipperClosedPolygon(lst_polylines[0].ToList(), arg_scale);
for (int i = 1; i < lst_polylines.Count; i++)
{
lst_pl = BooleanIntersection(lst_pl, GetClipperClosedPolygon(lst_polylines[i].ToList(), arg_scale));
}
return new Polyline(ClipperClosedPolygonToReal(lst_pl, arg_scale));
}
public static List<Point3d> ClipperClosedPolygonToRealGeopPoint3d(List<IntPoint> lst_intPoint, double arg_scale)
{
List<Point3d> lst_outerPoints = new List<Point3d>();
foreach (IntPoint point in lst_intPoint)
{
lst_outerPoints.Add(new Point3d((double) point.X / arg_scale, (double) point.Y / arg_scale, 0.0));
}
lst_outerPoints.Add(lst_outerPoints[0]);//On ferme le polygone
return lst_outerPoints;
}
public List<Point3d> PolylineCircle(Point3d arg_point, double arg_radius)
{
List<Point3d> output = new List<Point3d>();
double step = Math.PI / 10;
for (double angle = 0; angle < Math.PI * 2.0; angle += step)
{
Point3d pt = new Point3d(arg_point.X + arg_radius * Math.Cos(angle), arg_point.Y + arg_radius * Math.Sin(angle), 0.0);
output.Add(pt);
}
return output;
}
public static List<Point3d> ClipperClosedPolygonToReal(List<IntPoint> lst_intPoint, double arg_scale)
{
List<Point3d> lst_outerPoints = new List<Point3d>();
foreach (IntPoint point in lst_intPoint)
{
lst_outerPoints.Add(new Point3d((double) point.X / arg_scale, (double) point.Y / arg_scale, 0.0));
}
lst_outerPoints.Add(lst_outerPoints[0]);//On ferme le polygone
return lst_outerPoints;
}
public static List<IntPoint> GetClipperClosedPolygon(List<Point3d> lst_points, double arg_scale)
{
List<IntPoint> output = new List<IntPoint>();
foreach (Point3d point in lst_points)
{
output.Add(new IntPoint(point.X * arg_scale, point.Y * arg_scale));
}
return output;
}
/// <summary>
///
/// </summary>
/// <param name="arg_lst_points"></param>
/// <param name="arg_automaticSize"></param>
/// <param name="arg_size"></param>
/// <param name="arg_closestNumber"></param>
/// <param name="arg_maxCount"></param>
/// <param name="scale"></param>
/// <returns></returns>
public List<Polyline> Manhattan(List<Point3d> arg_lst_points, List<double> arg_lst_weights, bool arg_automaticSize, double arg_size, bool arg_closestNumber, int arg_maxCount, double scale)
{
//Bounding box to calculate the size of the bounding box
BoundingBox bb = new BoundingBox(arg_lst_points);
if (arg_automaticSize)
{
arg_size = bb.Diagonal.Length / 2;
}
IEnumerable<int[]> ie_tab_connectivity;
//Use of RTree closest point by distance
if (arg_closestNumber)
{
ie_tab_connectivity = RTree.Point3dKNeighbors(arg_lst_points, arg_lst_points, Math.Min(arg_lst_points.Count, arg_maxCount));
}
//Use of RTree number of closest point
else
{
ie_tab_connectivity = RTree.Point3dClosestPoints(arg_lst_points, arg_lst_points, arg_size / 2);
}
List<int[]> lst_tab_connectivity = ie_tab_connectivity.ToList();
List<Polyline> lst_outputCurves = new List<Polyline>();
for (int vertexIndex = 0; vertexIndex < arg_lst_points.Count; vertexIndex++)
{
int[] tab_connectivity = lst_tab_connectivity[vertexIndex];
List<Polyline> lst_curves = new List<Polyline>();
//For all points aroung the point except itself
foreach(int vertexIndexCutter in tab_connectivity)
{
if (vertexIndex != vertexIndexCutter)
{
//Add closed curves
lst_curves.Add(ManhattanPolylineBetweenPoints(arg_lst_points[vertexIndex], arg_lst_weights[vertexIndex], arg_lst_points[vertexIndexCutter], arg_lst_weights[vertexIndexCutter], arg_size));
}
}
//Calculate the intersections
if (lst_curves != null && lst_curves.Count > 0)
{
lst_outputCurves.Add(BooleanIntersection(lst_curves, scale));
}
}
return lst_outputCurves;
}
/// <summary>
/// Method to generate Manhattan Voronoi in plane XY
/// </summary>
/// <param name="arg_lst_points">List of points in XY plane</param>
/// <param name="arg_automaticSize">If true, automatic will be used</param>
/// <param name="arg_size">If arg_automaticSize is set to false this parameter is used to make the cells</param>
/// <param name="arg_closestNumber">If true, the method cloest number is used in RTree</param>
/// <param name="arg_maxCount">Number of closest points used</param>
/// <returns></returns>
public List<Curve> Manhattan(List < Point3d > arg_lst_points, List < double > arg_lst_weights, bool arg_automaticSize, double arg_size, bool arg_closestNumber, int arg_maxCount)
{
//Bounding box to calculate the size of the bounding box
BoundingBox bb = new BoundingBox(arg_lst_points);
if (arg_automaticSize)
{
arg_size = bb.Diagonal.Length / 2;
}
double tolerance = 1e-4;
IEnumerable<int[]> ie_tab_connectivity;
//Use of RTree closest point by distance
if (arg_closestNumber)
{
ie_tab_connectivity = RTree.Point3dKNeighbors(arg_lst_points, arg_lst_points, Math.Min(arg_lst_points.Count, arg_maxCount));
}
//Use of RTree number of closest point
else
{
ie_tab_connectivity = RTree.Point3dClosestPoints(arg_lst_points, arg_lst_points, arg_size / 2);
}
List<int[]> lst_tab_connectivity = ie_tab_connectivity.ToList();
List<Curve> lst_outputCurves = new List<Curve>();
for (int vertexIndex = 0; vertexIndex < arg_lst_points.Count; vertexIndex++)
{
int[] tab_connectivity = lst_tab_connectivity[vertexIndex];
List<Curve> lst_curves = new List<Curve>();
//For all points aroung the point except itself
foreach(int vertexIndexCutter in tab_connectivity)
{
if (vertexIndex != vertexIndexCutter)
{
//Add closed curves
lst_curves.Add(ManhattanCurveBetweenPoints(arg_lst_points[vertexIndex], arg_lst_weights[vertexIndex], arg_lst_points[vertexIndexCutter], arg_lst_weights[vertexIndexCutter], arg_size));
}
}
//Calculate the intersections
if (lst_curves != null && lst_curves.Count > 0)
{
Curve intersection = lst_curves[0];
for (int i = 1; i < lst_curves.Count; i++)
{
Curve[] curves = Curve.CreateBooleanIntersection(intersection, lst_curves[i], tolerance);
if (curves != null && curves.Length > 0)
{
intersection = curves[0];
}
}
lst_outputCurves.Add(intersection);
}
}
return lst_outputCurves;
}
public Polyline ManhattanPolylineBetweenPoints(Point3d arg_point1, double weight1, Point3d arg_point2, double weight2, double arg_length)
{
List<Point3d> lst_points = new List<Point3d> ();
Line outputLine = Line.Unset;
Point3d middle = (arg_point1 * weight1 + arg_point2 * weight2) / (weight1 + weight2);
Point3d manhattanPoint0 = Point3d.Unset;
Point3d manhattanPoint1 = middle;
Point3d manhattanPoint2 = middle;
Point3d manhattanPoint3 = Point3d.Unset;
double dx = arg_point2.X - arg_point1.X;
double dy = arg_point2.Y - arg_point1.Y;
//Middle curve calculation
if (Math.Abs(dx * dy) > 1e-12)
{
double minWidth = Math.Min(Math.Abs(dx), Math.Abs(dy));
Vector3d direction;
if (dx * dy > 0)
{
direction = new Vector3d(1, -1, 0);
}
else
{
direction = new Vector3d(1, 1, 0);
}
manhattanPoint1 = middle + direction * minWidth / 2;
manhattanPoint2 = middle - direction * minWidth / 2;
Vector3d dir = manhattanPoint2 - manhattanPoint1;
//Just diagonal line
if (Math.Abs(Math.Abs(dx) - Math.Abs(dy)) < 1e-12)
{
dir.Unitize();
}
else
{
if (Math.Abs(dx) < Math.Abs(dy))
{
dir.Y = 0;
dir.Unitize();
}
else
{
dir.X = 0;
dir.Unitize();
}
}
manhattanPoint0 = manhattanPoint1 - dir * arg_length;
manhattanPoint3 = manhattanPoint2 + dir * arg_length;
}
else
{
if (Math.Abs(dx) > 1e-6)
{
manhattanPoint0 = middle - Vector3d.YAxis * arg_length;
manhattanPoint3 = middle + Vector3d.YAxis * arg_length;
}
else
{
manhattanPoint0 = middle - Vector3d.XAxis * arg_length;
manhattanPoint3 = middle + Vector3d.XAxis * arg_length;
}
}
List<Point3d> lst_points_pl = new List<Point3d>();
lst_points_pl.Add(manhattanPoint0);
lst_points_pl.Add(manhattanPoint1);
lst_points_pl.Add(manhattanPoint2);
lst_points_pl.Add(manhattanPoint3);
return GetClosedPolyline(lst_points_pl, arg_point1, arg_length * 2);
}
/// <summary>
/// Make a cell between 2 points,
/// </summary>
/// <param name="arg_point1">the cell will contain this point</param>
/// <param name="arg_point2"></param>
/// <param name="arg_length">Length of 2 laterals lines</param>
/// <param name="arg_angle">Angle of rotation</param>
/// <returns>A closed curve</returns>
public Curve ManhattanCurveBetweenPoints(Point3d arg_point1, double weight1, Point3d arg_point2, double weight2, double arg_length)
{
List<Curve> lst_curves = new List<Curve> ();
Line outputLine = Line.Unset;
Point3d middle = (arg_point1 * weight1 + arg_point2 * weight2) / (weight1 + weight2);
double dx = arg_point2.X - arg_point1.X;
double dy = arg_point2.Y - arg_point1.Y;
//Middle curve calculation
if (Math.Abs(dx * dy) > 1e-12)
{
double minWidth = Math.Min(Math.Abs(dx), Math.Abs(dy));
Vector3d direction;
if (dx * dy > 0)
{
direction = new Vector3d(1, -1, 0);
}
else
{
direction = new Vector3d(1, 1, 0);
}
Point3d manhattanPoint1 = middle + direction * minWidth / 2;
Point3d manhattanPoint2 = middle - direction * minWidth / 2;
outputLine = new Line(manhattanPoint1, manhattanPoint2);
lst_curves.Add(outputLine.ToNurbsCurve());
Vector3d dir = manhattanPoint2 - manhattanPoint1;
//Just diagonal line
if (Math.Abs(Math.Abs(dx) - Math.Abs(dy)) < 1e-12)
{
dir.Unitize();
}
else
{
if (Math.Abs(dx) < Math.Abs(dy))
{
dir.Y = 0;
dir.Unitize();
}
else
{
dir.X = 0;
dir.Unitize();
}
}
Line line1 = new Line(manhattanPoint2, manhattanPoint2 + dir * arg_length);
Line line2 = new Line(manhattanPoint1, manhattanPoint1 - dir * arg_length);
lst_curves.Add(line1.ToNurbsCurve());
lst_curves.Add(line2.ToNurbsCurve());
}
else
{
if (Math.Abs(dx) > 1e-6)
{
Line line1 = new Line(middle - Vector3d.YAxis * arg_length, middle + Vector3d.YAxis * arg_length);
lst_curves.Add(line1.ToNurbsCurve());
}
else
{
Line line1 = new Line(middle - Vector3d.XAxis * arg_length, middle + Vector3d.XAxis * arg_length);
lst_curves.Add(line1.ToNurbsCurve());
}
}
Curve[] tab_curves = Curve.JoinCurves(lst_curves);
Curve cc = null;
if (tab_curves != null && tab_curves.Length > 0)
{
cc = GetClosedCurve(tab_curves[0], arg_point1, arg_length * 2);
}
return cc;
}
public Polyline GetClosedPolyline(List < Point3d > lst_points, Point3d p, double l)
{
List<Point3d> lst_pointsNew = new List<Point3d>();
Vector3d direction = p - (lst_points[1] + lst_points[2]) / 2;
direction.Unitize();
lst_pointsNew.Add(lst_points[0] + direction * l);
lst_pointsNew.Add(lst_points[0]);
lst_pointsNew.Add(lst_points[1]);
lst_pointsNew.Add(lst_points[2]);
lst_pointsNew.Add(lst_points[3]);
lst_pointsNew.Add(lst_points[3] + direction * l);
lst_pointsNew.Add(lst_points[0] + direction * l);
return new Polyline(lst_pointsNew);
}
public Curve GetClosedCurve(Curve c, Point3d p, double l)
{
Vector3d direction = p - c.PointAtNormalizedLength(0.5);
direction.Unitize();
Point3d p1 = c.PointAtEnd;
Point3d p2 = c.PointAtEnd + direction * l;
Point3d p4 = c.PointAtStart;
Point3d p3 = c.PointAtStart + direction * l;
Line l1 = new Line(p1, p2);
Line l2 = new Line(p2, p3);
Line l3 = new Line(p3, p4);
List<Curve> curves = new List<Curve>();
curves.Add(c);
curves.Add(l1.ToNurbsCurve());
curves.Add(l2.ToNurbsCurve());
curves.Add(l3.ToNurbsCurve());
Curve[] cs = Curve.JoinCurves(curves);
return cs[0];
}
// </Custom additional code>
}