Confirmed. Removed the clusters and flickering stopped. I am appalled at this performance obstacle.

hbot_2021_Jul17b.gh (43.8 KB)
Confirmed. Removed the clusters and flickering stopped. I am appalled at this performance obstacle.
The input to the motors is clear - a quantity of rotation (whether degrees, radians, or steps / encoder counts). My goal is to “seamlessly” use our existing platform with its large repo of community tracks in polar format, without having to resample and generate separate XY versions of them. The simplest example is the erase track - a 100-turn Arch. spiral from center to edge. Erase.thr:
0 0
628.32 1
If all I do is convert those to XY, it will just draw a straight line from 0,0 to 1,0 using an XY rig. I just need to calc all the intermediate points along the spiral on the fly. Shouldn’t be too difficult to do - just wanted a visual confirmation of my method as it comes together. BTW, there is a “third axis” to consider - i.e. time. The current goal is to keep the magnet (ball) moving at constant velocity (though this independent axis is wide open for artistic expression as well).
Your “polar format” can not be used to derive motor angles directly in this H-bot world, correct?
So yeah, you need to derive a list of points along your path OR use Evaluate Curve to move a point along the path. Either way, these points are XY coordinates.
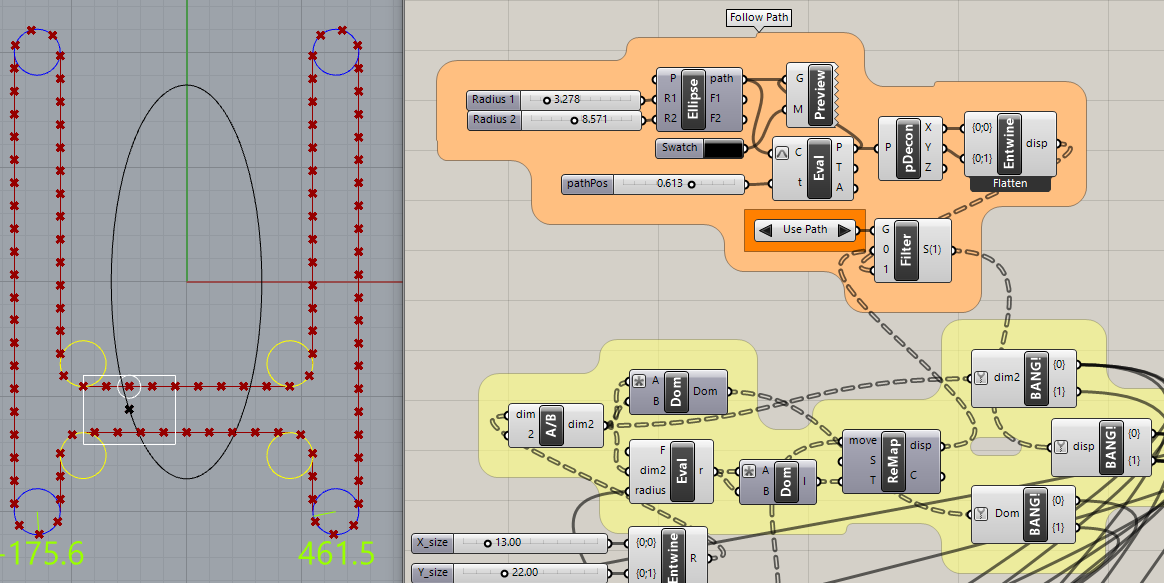
See the orange group below. It has a Value List switch to choose either ‘XY Move’ as before (sliders in blue group) or ‘Use Path’ to move a point along a curve with the ‘pathPos’ slider.
P.S. Skip this code and use version ‘Jul17d’ below.
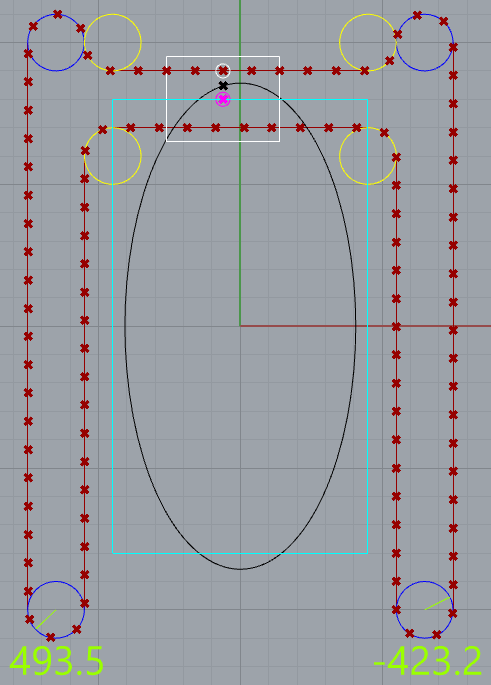
I wish I had thought of these things earlier but it got complicated. I added a ‘Working Area’ rectangle, a ‘Tool Position’ indicator (magenta circled point) and finally solved the issues of keeping the tool within the working area for both ‘XY Move’ and ‘Use Path’ methods. This version is the best!
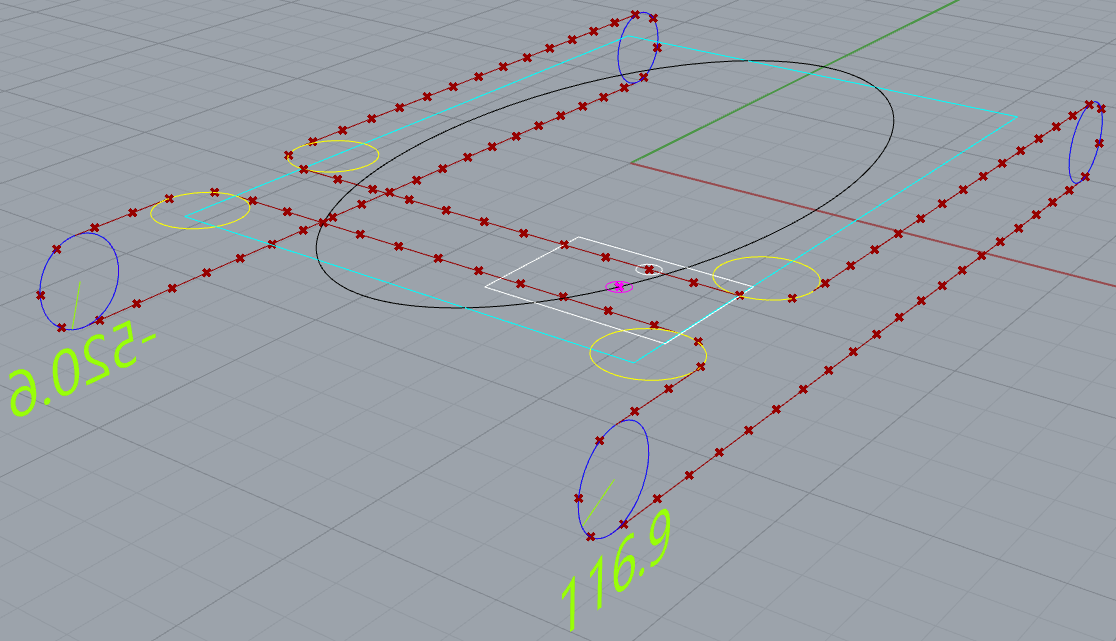
Is this too much? Yeah, but it’s way cool, eh? The blue pulleys are mounted on horizontal axes. 
That looks cool, and it would work with omnidirectional drive belt (like the plastic ball-chain in the video). But using mechanically reliable flat timing belt, it’d have to twist 90 degrees over four spans - maybe OK over long spans, but not when blue and yellow are close.
Good point! So unless a reliable “bead chain” can be found, version hbot_2021_Jul17d.gh remains the best one today. The benefit of version ‘e’ is more working area for a given width overall, but maybe it’s not as good for watching the blue pulleys turn.
Quick follow-up. Though the sim definitions you shared weren’t strictly required, they definitely helped me a great deal in grokking the H-bot mechanism (which now feels obvious, but wasn’t at all for me at first). My very crude, quick-and-dirty proto needs to be rebuilt before adding a magnet, sand field, and ball - but it appears to work (and I can use it with our polar software). Thanks again!
Seems like a lot of tension on the belts there…